+7 (495) 785-95-25
+7 (495) 785-95-25 sale@lcard.ru
sale@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
В работе [1] рассмотрена математическая модель шагового двигателя. Особенности «большого» и «малого» перемещений требуют реализации разных подходов к решению задачи стабилизации. Для больших перемещений авторами предлагается использовать алгоритм активного регулирования по информации с датчика положения. Предложен алгоритм малых перемещений и принцип стабилизации с учетом использования упругодиссипативных свойств в процессе создания и управления стопорящего момента.
Экспериментальные исследования привода виброзащиты проводились с использованием Установки измерительной LTR‑EU‑2‑5 в конфигурации с модулем АЦП LTR210. Использовалось ПО PowerGraph для визуализации, хранения, обработки и анализа результатов измерений.
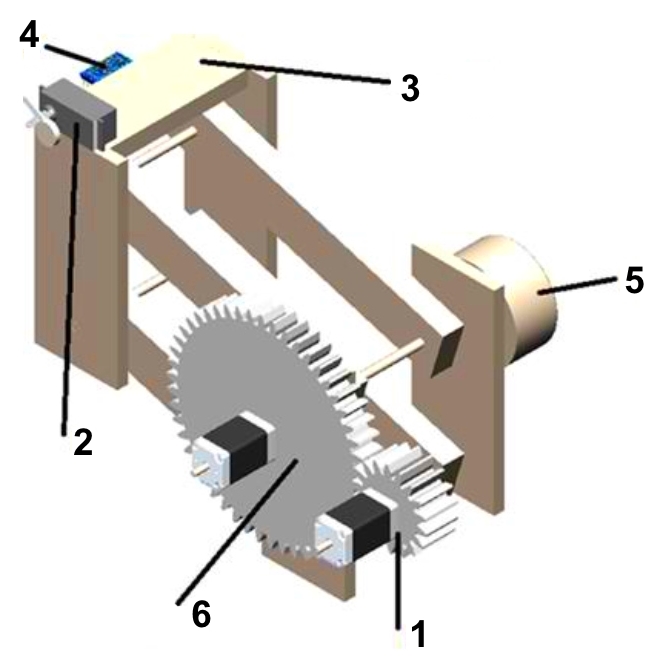
На рисунке 1 представлена 3D‑модель предлагаемого конструктивного решения.
|
|
Рисунок 1. 3D-модель привода. Модель содержит механизм параллельной конструкции (3) с активным управлением, осуществляемым двумя шаговыми двигателями (1) и измерительной системой, состоящей из акселерометра (4), датчика угла поворота (5), которые обеспечивают позиционирование установки. Первый двигатель работает в режиме активного управления, второй, подключенный через редуктор (6), обеспечивает режим активного демпфирования. Возбудитель (2) создает гармонические колебания. |
Структурная схема модели, представлена на рисунке 2.
|
|
Рисунок 2. Структурная схема. Схема состоит из шагового двигателя (1), работающего в режимах демпфера или интегратора, источника колебаний (2), акселерометра (3), механической части (4), датчика угла поворота (5), устройств управления (6), блока питания (7) и драйвера (8). Датчик угла поворота (5) на основе потенциометра используется для определения отклонений в установке. Сигналы с датчика считываются и обрабатываются устройством управления. После обработки эти сигналы передаются в двигатель. В установке также используется акселерометр для измерения возмущений системы. |
В математических моделях авторами учитывалась работа двигателя в режиме активного демпфирования, что позволит уменьшить габариты внешних упругих диссипативных элементов. Учёт работы двигателя позволил реализовать алгоритм управления системой виброзащиты физической модели с учетом влияния на управляющий внешний крутящий момент. В ходе исследований удалось снизить вибрационную активность на 5 дБ в режиме динамического подавления вибрации. На рисунках 4‑6 показаны результаты, полученные при эксплуатации установки с различными вариантами виброзащиты.

Рисунок 3. График работы установки без виброизолирующих устройств.

Рисунок 4. График работы установки с пассивным упругим элементом.

Рисунок 5. График работы установки в режиме активного упругодиссипативного поглощения.
Проведенные эксперименты наглядно демонстрируют возможность существенного повышения эффективности системы виброзащиты. Имеет место эффективное снижение амплитуд колебаний. Замена активной системы на пассивную упругую систему приводит к возникновению дополнительных колебаний. Созданное устройство является эффективным и может использоваться для решения задач специального машиностроения.
Источники:
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон:
+7 (495) 785-95-25
Отдел продаж: sale@lcard.ru
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск